Partes que lo forman y principio de funcionamiento
Los motores asíncronos o de inducción son un tipo de motor de corriente alterna en el que la corriente eléctrica del rotor necesaria para producir torsión es inducida por inducción electromagnética del campo magnético de la bobina del estator. Por lo tanto un motor de inducción no requiere una conmutación mecánica aparte de su misma excitación o para todo o parte de la energía transferida del estator al rotor, como en los motores universales, motores DC y motores grandes síncronos. El primer prototipo de motor eléctrico capaz de funcionar con corriente alterna fue desarrollado y construido por el ingeniero Nikola Tesla y presentado en el American Institute of Electrical Engineers (en español, Instituto Americano de Ingenieros Eléctricos, actualmente IEEE) en 1888.

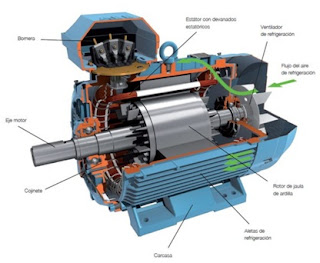




El motor asíncrono trifásico está formado por un rotor, que puede ser de dos tipos: a) de jaula de ardilla; b) bobinado, y un estator, en el que se encuentran las bobinas inductoras. Estas bobinas son trifásicas y están desfasadas entre sí 120º en el espacio. Según el Teorema de Ferraris, cuando por estas bobinas circula un sistema de corrientes trifásicas equilibradas, cuyo desfase en el tiempo es también de 120º, se induce un campo magnético giratorio que envuelve al rotor. Este campo magnético variable va a inducir una tensión eléctrica en el rotor según la Ley de inducción de Faraday
El motor asíncrono trifásico está formado por un rotor, que puede ser de dos tipos: a) de jaula de ardilla; b) bobinado, y un estator, en el que se encuentran las bobinas inductoras. Estas bobinas son trifásicas y están desfasadas entre sí 120º en el espacio. Según el Teorema de Ferraris, cuando por estas bobinas circula un sistema de corrientes trifásicas equilibradas, cuyo desfase en el tiempo es también de 120º, se induce un campo magnético giratorio que envuelve al rotor. Este campo magnético variable va a inducir una tensión eléctrica en el rotor según la Ley de inducción de Faraday. Los más comunes en la industria son los motores de jaula de ardilla.
En términos generales, el motor de inducción consta de las siguientes partes, como se ve en la imagen:

Principio de funcionamiento
El motor asincrónico funciona según el principio de inducción mutua de Faraday. Al aplicar corriente alterna trifásica a las bobinas inductoras, se produce un campo magnético giratorio, conocido como campo rotante, cuya frecuencia será igual a la de la corriente alterna con la que se alimenta al motor. Este campo al girar alrededor del rotor en estado de reposo, inducirá corrientes en el mismo, que producirán a su vez un campo magnético que seguirá el movimiento del campo estatórico, produciendo un par que hace que el rotor gire (principio de inducción mutua). No obstante, como la inducción en el rotor sólo se produce si hay una diferencia en las velocidades relativas del campo estatórico y el rotórico, la velocidad del rotor nunca alcanza a la del campo rotante. De lo contrario, si ambas velocidades fuesen iguales, no habría inducción y el rotor no produciría par. A esta diferencia de velocidad se la denomina “deslizamiento” y se mide en términos porcentuales, por lo que ésta es la razón por la cual a los motores de inducción se los denomina asincrónicos, ya que la velocidad rotórica difiere levemente de la del campo rotante. El deslizamiento difiere con la carga mecánica aplicada al rotor, siendo máximo con la máxima carga aplicada al mismo.
La velocidad del campo magnético giratorio del estator (llamada velocidad síncrona) depende de la cantidad de polos del motor y de la frecuencia de la tensión de alimentación. Esto puede expresarse matemáticamente de la siguiente forma:
Donde:
Ns = Velocidad síncrona (en r.p.m.)
f = frecuencia (en Hz)
p = Número de pares de polos del estator
Por ejemplo, el motor del video anterior tiene 3 pares de polos.
Si está conectado a una tensión trifásica de 50 Hz, la velocidad síncrona será:
Y conectado a una red de 60 Hz:
Esto significa que el motor no puede girar a una velocidad cualquiera, sino que existen unos valores predeterminados por la frecuencia de la tensión de alimentación y las características constructivas.
El rotor siempre gira un poco más despacio que el campo magnético del estator. Esta velocidad se llama asíncrona y la diferencia entre ambas se denomina deslizamiento. Generalmente los valores del deslizamiento están entre el 2% y el 4%.
A modo de ejemplo, veamos parte de un catálogo de motores trifásicos de la marca Siemens, alimentados con una tensión de 60 Hz. Nótese la diferencia entre las velocidades síncrona y asíncrona a plena carga.

Comentarios
Publicar un comentario